Solis Rover Project
Student-Led Team Project
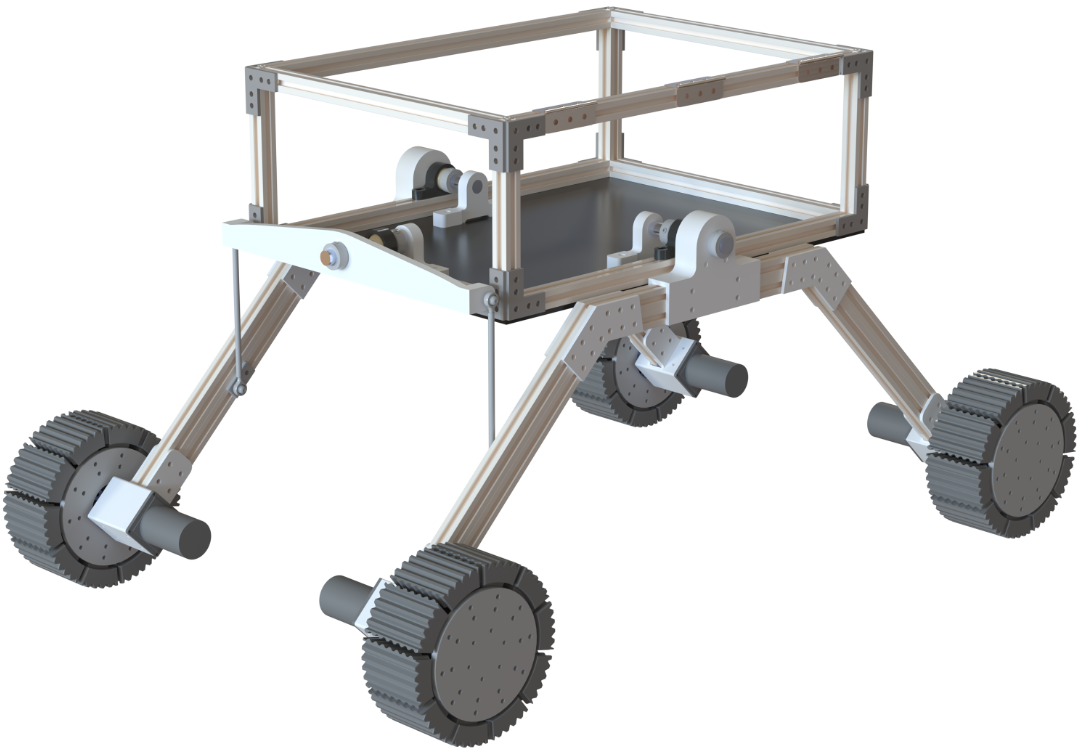
As a member of the Solis Rover Project, our team engineered a rover for autonomous exploration and astrobiological analysis. We built the rover on a lightweight aluminum chassis with a rocker-bogie suspension for all-terrain stability and developed a precision manipulator arm on a linear rail for fine movements during complex tasks. For command and control, we developed a reliable system featuring a dual-band radio for robust video and control signals, and we created a base station server to ensure smooth, low-latency communication. For autonomous navigation, the rover intelligently combines information from its cameras and GPS sensors , allowing it to create a 3D map of its surroundings while tracking its position and recognizing objects in real-time.